
Our postdoctoral researcher, Dr. Li Ping proposed an active disturbance rejection control (ADRC) method by combining 2-DOF internal model control (IMC) rules and linear extended state observer (LSO) in IEEE Transactions on Industrial Electronics (IF = 7.503).
This method could be used for motion control of servo motor drive system with network communication delay, which significantly improves the control accuracy of servo system under parameter uncertainty and external disturbance.
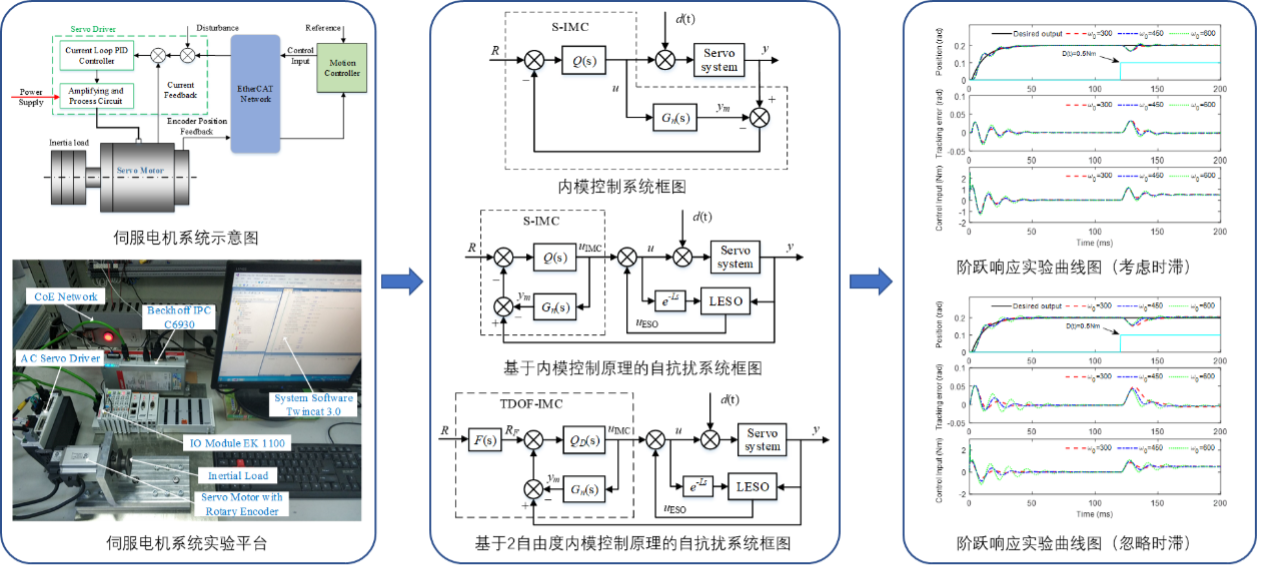
The networked motion control system is widely used because of its low cost, high flexibility, high reliability, easy configuration, and information detection. However, the network communication mode not only facilitates the operation of the motion control system but also introduces the communication lag. In addition, the servo motor drive system may encounter various modeling errors and external disturbances. This will seriously reduce the control performance, and even lead to system instability. To solve this problem, an active disturbance rejection control (ADRC) method combining 2-DOF internal model control (IMC) rules and linear extended state observer (LSO) is proposed.
In this method, the first-order Taylor expansion is used to approximate the time-delay link, and then the 2-DOF internal model control rule is used to adjust the parameters of the controller, and the linear extended state observer is designed to estimate and compensate the total disturbance of the system online, so as to realize the active disturbance rejection control of the system. The control method proposed in this paper is simple and intuitive, easy for control engineers to understand, easy for engineering practice, and based on EtherCAT protocol servo motor driven motion platform for comparative experimental verification, the results show that: whether under the action of external disturbance or system parameter uncertainty, the method achieves better robust stability and stability than the existing methods Tracking control accuracy. In the future, the research group will focus on the application of this method in the motion control of exoskeleton robots and medical rehabilitation robots.
Ping Li, a postdoctoral fellow of Southern University of Science and Technology, is the first author of this article. Zhang Mingming, assistant professor of Southern University of Science and Technology, and Zhu Guoli, Professor of Huazhong University of Science and Technology, are the co-corresponding authors of this article. Southern University of Science and Technology is the first unit and communication unit.