

朱飞:面向开放环境的未知拒识
朱飞博士于2024年8月21日下午14点-15点在工学院南楼722会议室,为我们带来报告,主题为:面向开放环境的未知拒识。 个人简介: 朱飞博士于2018年获清华大学学士学位,2023年获中科院自动化所模式识别与智能系统博士学位。主要研究开放环境下的可信与持续学习理论与方法,在国际顶级学术会议和顶级期刊上发表论文十来篇。 演讲摘要:

瑞士洛桑联邦理工学院杰出教授Silvestro Micera到访南方科技大学脑-机器人康复技术实验室
近日,南方科技大学脑-机器人康复技术实验室迎来了一位贵宾——瑞士洛桑联邦理工学院的杰出教授Silvestro Micera。Silvestro Micera教授此次到访,旨在与实验室团队进行深入交流,共同探讨脑科学与机器人技术在康复医学领域的最新发展和应用。Silvestro

张立:软物质构建微型软体机器人
香港中文大学机械与自动化工程学系教授、博导张立,将于2023年11月22日上午10点-11点在腾讯会议(会议号:220 417 360),为我们带来线上报告,报告内容为:软物质构建微型软体机器人。 摘要:
林雨洲:针对肌电控制应用的稳健及可靠的手势识别
林雨洲博士于2023年8月25日下午14点30分-15点30分在工学院南楼812会议室,为我们带来报告,主题为:针对肌电控制应用的稳健及可靠的手势识别。 个人简介: 林雨洲分别于2015年和2016年获得英国谢菲尔德大学 (University

文成林:申请国家自然科学基金的心得 / 信息融合与故障诊断研究现状分析与展望
博士后、二级教授、博士生指导教师文成林,将于2022年11月2日下午15点-16点在腾讯会议(会议号:655 704 134),为我们带来线上报告,报告内容为:申请国家自然科学基金的心得 /

Prof. Bin Fang will Give an Online Lecture about Tactile Perception And Interactive Learning For Robotic Dexterity
清华大学计算机系助理教授,中国人工智能学会认知系统与信息处理专委会秘书长方斌,将于2022年9月16日下午14点30分-115点30分在腾讯会议(会议号:930 723 619),为我们带来线上报告,题目为:机器人灵巧操作的触觉感知与交互学习。 个人简介:

张明明:2022年南方科技大学机器人交互技术及医工应用高端系列论坛
2022年南方科技大学机器人交互技术及医工应用高端系列论坛在主办单位南方科技大学的大力支持下将于2022年1月11-13日以腾讯会议的方式开展。本次专题在线论坛的组织架构为4位荣誉主席、13位指导委员会成员、2位组委会秘书、1位执行主席。 其中,张明明助理教授作为执行主席主持本次论坛。

张明明:任务导向性康复机器人及其多模态交互技术
张明明助理教授受邀在《机器人》“医疗机器人技术”专题在线论坛,于9月10日(周五)14:00-15:00作报告,题目为《任务导向性康复机器人及其多模态交互技术》
Prof. Zhang Mingming gave a Keynote Talk in 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR)
The 2021 IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR 2021) took place from July 15 to 19, 2021 in Xining, Qinghai, China. Dr. Mingming Zhang, from Southern University of Science and Technology, gave a Keynote Talk with the topic as Task-oriented rehabilitation techniques with robot-assisted information feedback.

Prof. Dongrui Wu will Give an Online Lecture about Machine Learning in Brain-Computer Interfaces
华中科技大学人工智能与自动化学院教授、博导,图像信息处理与智能控制教育部重点实验室副主任伍冬睿,将于2021年5月27日下午3点-4点在腾讯会议(会议号:960209065),为我们带来线上报告,题目为:Machine Learning in Brain-Computer
祝贺钟文娟在IEEE M2VIP国际会议上荣获最佳会议论文奖
恭喜脑-机器人康复技术实验室钟文娟在第29届IEEE国际机电一体化与实践机器视觉大会(M2VIP)上荣获了最佳会议论文奖(Best Conference Paper),论文标题为:A Spatio-Temporal
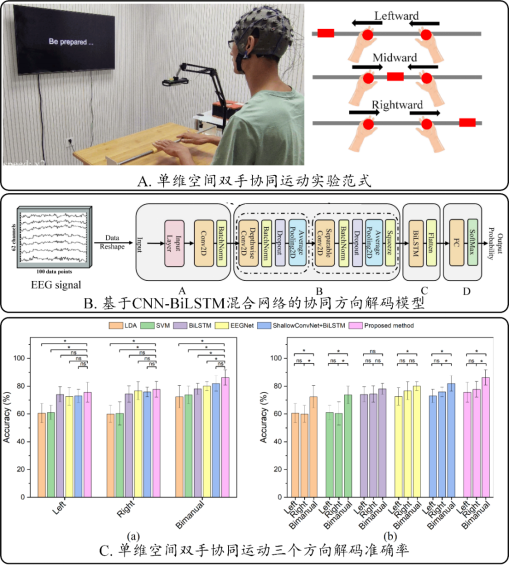
Research Progress in A New Compound-limbs Paradigm: Integrating upper-limb swing improves lower-limb stepping intention decoding from EEG was Reported by IEEE TNSRE
Our master student ,RuiMa, and postdoctoral fellow,Yifeng Chen, proposed a study about A New Compound-limbs Paradigm: Integrating upper-limb swing improves lower-limb stepping intention decoding from EEG inIEEE Transactions on Neural Systems and Rehabilitation Engineering(jcr-2,IF: 4.9)
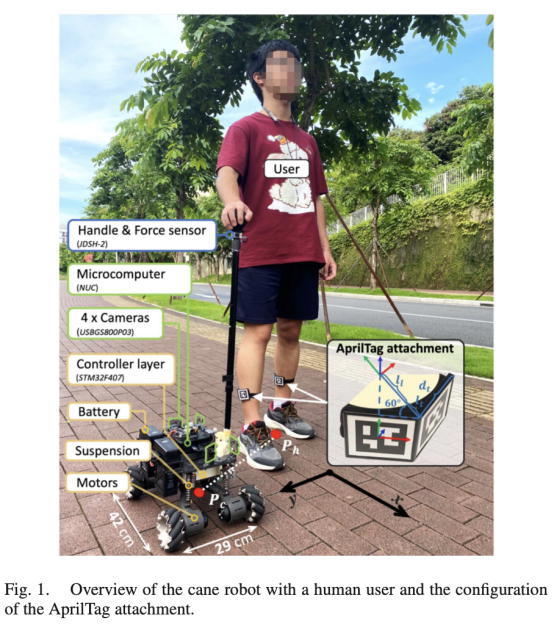
Research Progress in Close-Range Human Following Control on a Cane-Type Robot With Multi-Camera Fusion was Reported by IEEE RAL
Our masters student ,Haowen Liu and Fengxian Wu, proposed a study about Close-Range Human Following Control on a Cane-Type Robot With Multi-Camera Fusion in IEEE Robotics and Automation Letters (RA-L) (IF = 4.321).

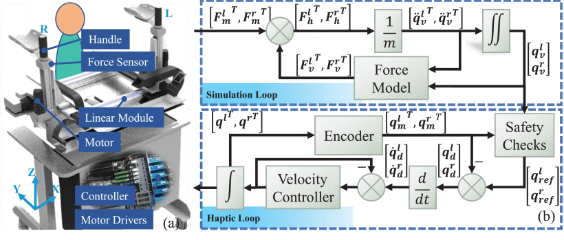
Research Progress in Robot-Assisted Haptic Rendering for Nail Hammering: A Representative of IADL Tasks was Reported by IEEE T-ASE
Our doctoral student Changqi Zhang proposed a study about Robot-Assisted Haptic Rendering for Nail Hammering: A Representative of IADL Tasks in IEEE Transactions on Automation Science and Engineering (IF = 6.636).
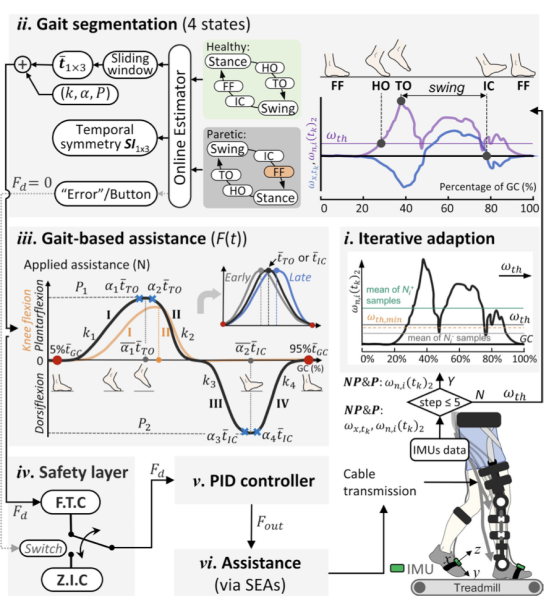
Research Progress in A Cable-Driven Exoskeleton With Personalized Assistance Improves the Gait Metrics of People in Subacute Stroke by IEEE TNSRE
Our master students,Bin Zhong,Mei Shen and Haowen Liu,proposed a study about A Cable-Driven Exoskeleton With Personalized Assistance Improves the Gait Metrics of People in Subacute Stroke in IEEE Transactions on Neural Systems and Rehabilitation Engineering (IF = 4.528).
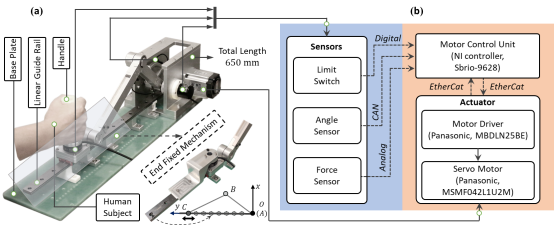
Research Progress in An Optimized Portable Cable-Driven Haptic Robot Enables Free Motion and Hard Contact was Reported by IEEE ICRA
Our doctoral student Changqi Zhang proposed a study about An Optimized Portable Cable-Driven Haptic Robot Enables Free Motion and Hard Contact in IEEE International Conference on Robotics and Automation (IF = 5.9).
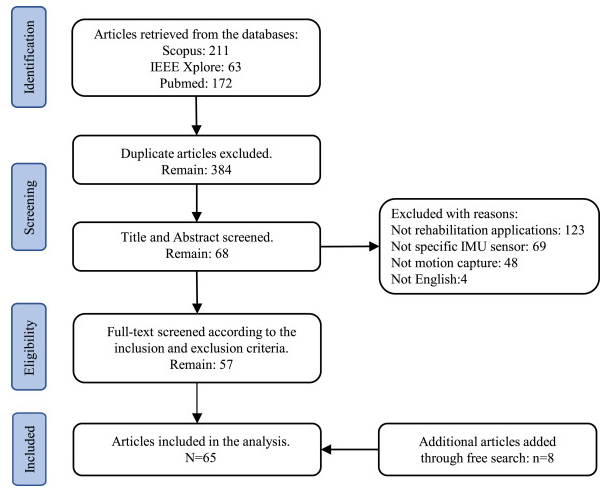
Research Progress in IMU-based Mocap System for Rehabilitation Applications: A Systematic Review was Reported by Biomimetic Intelligence and Robotics
Our undergraduate student Chenyu Gu and master student Weicong Lin,proposed a study about IMU-based Mocap System for Rehabilitation Applications: A Systematic Review in Biomimetic Intelligence and Robotics.
Research Progress in Haptic Rendering of Soft Object Interaction for Robot-aided Neurorehabilitation was Reported by IEEE ICARM
Our master student Yudong Liu proposed a study about Haptic Rendering of Soft Object Interaction for Robot-aided Neurorehabilitation in International Conference on Advanced Robotics and Mechatronics (ICARM).
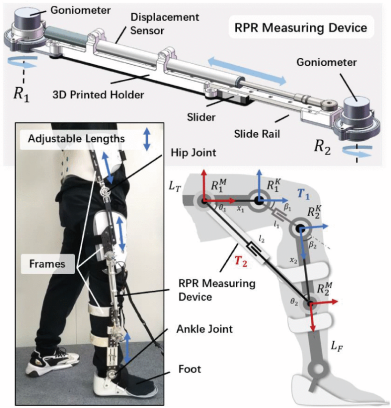
Research Progress in Human-Exoskeleton Misalignment Reduction on Knee Joint via an RPR Mechanism-Based Device was Reported by IEEE ARM
Our undergraduate student Cunxi Dai proposed a study about Human-Exoskeleton Misalignment Reduction on Knee Joint via an RPR Mechanism-Based Device in IEEE International Conference on Advanced Robotics and Mechatronics (ARM).