

朱飞:面向开放环境的未知拒识
朱飞博士于2024年8月21日下午14点-15点在工学院南楼722会议室,为我们带来报告,主题为:面向开放环境的未知拒识。 个人简介: 朱飞博士于2018年获清华大学学士学位,2023年获中科院自动化所模式识别与智能系统博士学位。主要研究开放环境下的可信与持续学习理论与方法,在国际顶级学术会议和顶级期刊上发表论文十来篇。 演讲摘要:

瑞士洛桑联邦理工学院杰出教授Silvestro Micera到访南方科技大学脑-机器人康复技术实验室
近日,南方科技大学脑-机器人康复技术实验室迎来了一位贵宾——瑞士洛桑联邦理工学院的杰出教授Silvestro Micera。Silvestro Micera教授此次到访,旨在与实验室团队进行深入交流,共同探讨脑科学与机器人技术在康复医学领域的最新发展和应用。Silvestro

张立:软物质构建微型软体机器人
香港中文大学机械与自动化工程学系教授、博导张立,将于2023年11月22日上午10点-11点在腾讯会议(会议号:220 417 360),为我们带来线上报告,报告内容为:软物质构建微型软体机器人。 摘要:
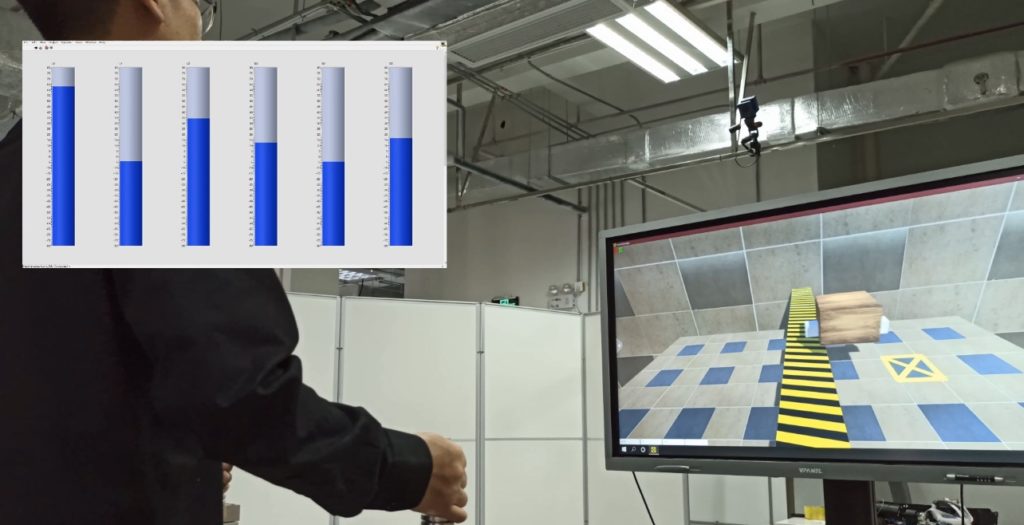
林雨洲:针对肌电控制应用的稳健及可靠的手势识别
林雨洲博士于2023年8月25日下午14点30分-15点30分在工学院南楼812会议室,为我们带来报告,主题为:针对肌电控制应用的稳健及可靠的手势识别。 个人简介: 林雨洲分别于2015年和2016年获得英国谢菲尔德大学 (University

文成林:申请国家自然科学基金的心得 / 信息融合与故障诊断研究现状分析与展望
博士后、二级教授、博士生指导教师文成林,将于2022年11月2日下午15点-16点在腾讯会议(会议号:655 704 134),为我们带来线上报告,报告内容为:申请国家自然科学基金的心得 /
祝贺钟文娟在IEEE M2VIP国际会议上荣获最佳会议论文奖
恭喜脑-机器人康复技术实验室钟文娟在第29届IEEE国际机电一体化与实践机器视觉大会(M2VIP)上荣获了最佳会议论文奖(Best Conference Paper),论文标题为:A Spatio-Temporal Graph Convolutional Network for Gesture Recognition from High-Density Electromyography,其组内成员有钟文娟、张昱阳、付沛文、熊雯萱,指导老师为张明明老师。 Congratulations to Wenjuan Zhong from the Brain-Robot Rehabilitation Technology Lab for winning the Best Conference Paper Award at the 29th IEEE Interational Conference on Mechatronics and Machine Vision in Practice (M2VIP). The title of