
Our Ph.D. student Bin Zhong proposed a study about Enhancement via a Cable-Driven Exoskeleton Powered in IEEE Robotics and Automation Letters (IF = 3.741).
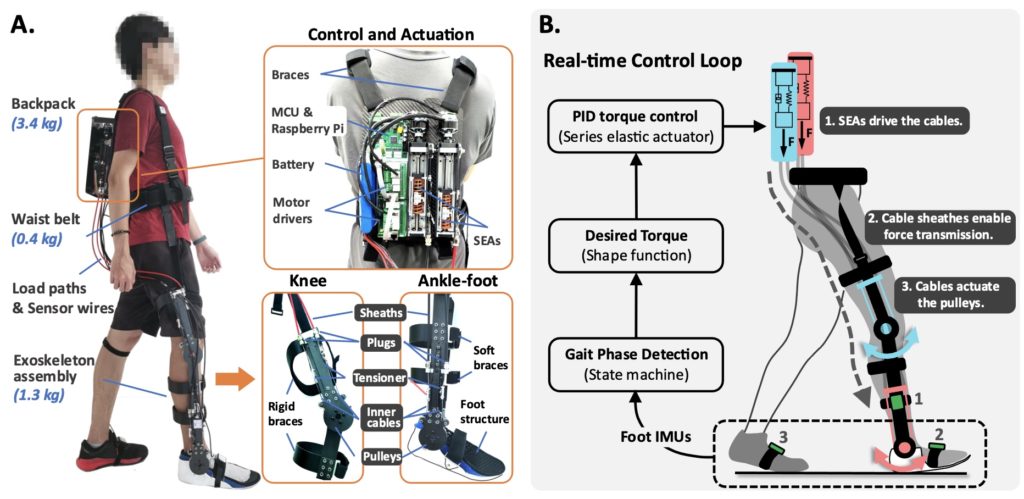
Gait rehabilitation is essential for chronic stroke patients to regain independent walking ability and quality of life, of which symmetry is regarded as a gold standard of gait quality. In this letter, a cable-driven lower limb exoskeleton powered by series elastic actuators (SEAs) has been developed, and a generalized gait-phase-based assistive strategy has been presented to enhance the gait symmetry of chronic stroke patients in the future. This strategy features a parameterized assistive force generation method that allows individuals customization to achieve more synchronized assistance with their walking gait patterns. A compliant human-robot interaction is guaranteed by SEA, and the exoskeleton exhibits low passive impedance and good transparency. The proposed assistive strategy was evaluated with five able-bodied subjects walking with the assistance from exoskeleton while adding artificial impairments to mimic a pathological gait with deficits (i.e., reduced knee flexion and foot-drop). Experimental results proved its efficacy in enhancing temporal walking gait symmetry to the levels comparable to participants’ normal gait.
Bin Zhong, a Ph.D. student of Southern University of Science and Technology, is the first author of this article. Mingming Zhang, assistant professor of Southern University of Science and Technology, is the corresponding author of this article. Southern University of Science and Technology is the first unit and communication unit.