
Our Doctoral student Chenyang Sun and Assistant Professor MingMing Zhang proposed a study about A Robotic System to Deliver Multiple Physically Bimanual Tasks via Varying Force Fields in IEEE Transactions on Neural Systems and Rehabilitation Engineering (Top期刊).
Individuals with physical limb disabilities are often restricted to perform activities of daily life (ADLs). While efficacy of bilateral training has been demonstrated in improving physical coordination of human limbs, few robots have been developed in simulating people’s ADLs integrated with task-specific force field control. This study sought to develop a bilateral robot for better task ren- dering of general ADLs (gADLs), where gADL-consistent workspace is achieved by setting linear motors in series, and haptic rendering of multiple bimanual tasks (coupled, uncoupled and semi-coupled) is enabled by regulating force fields between robotic handles. Experiments were con- ducted with human users, and our results present a viable method of a single robotic system in simulating multiple physically bimanual tasks. In future, the proposed robotic system is expected to be serving as a coordination training device, and its clinical efficacy will be also investigated.
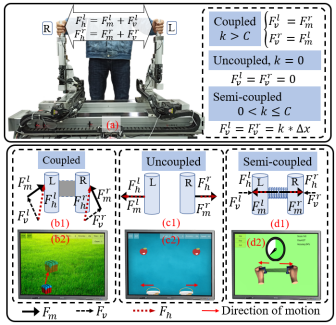
Force modeling of three types of bimanual tasks and corresponding schematic diagrams
Chenyang Sun, PhD student at Southern University of Science and Technology, and Mingming Zhang, assistant professor at Southern University of Science and Technology, are co-first authors. Mingming Zhang and Xinyu Wu are co-corresponding authors of this paper.