
Our master students, Wenjuan Zhong and Xueming Fu, proposed a study about Prediction of Continuous Knee Joint Movement via a Muscle Synergy-Driven ANFIS Model in IEEE Transactions on Fuzzy Systems (IF = 12.029).
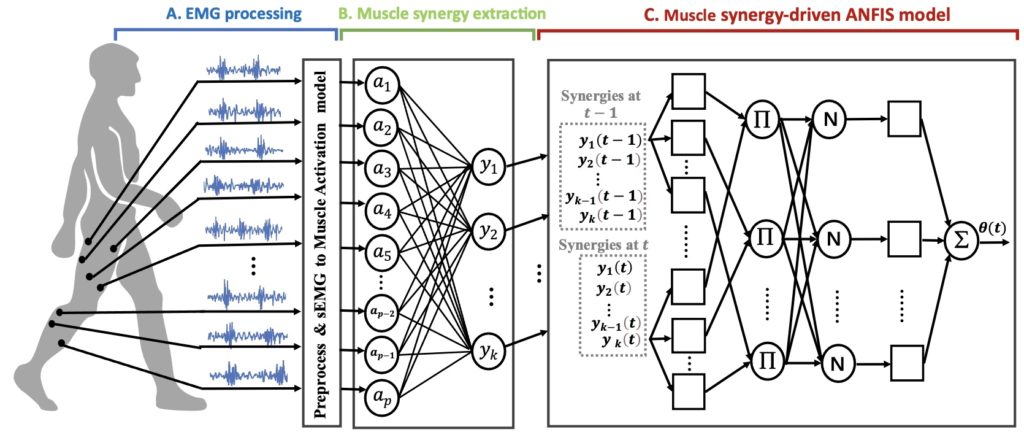
Continuous motion prediction plays a significant role in realizing seamless control of robotic exoskeletons and orthoses. Explicitly modeling the relationship between coordinated muscle activations from surface electromyography (sEMG) and human limb movements provides a new path of sEMG-based human-machine interface. Instead of the numeric features from individual channels, we propose a muscle synergy-driven ANFIS approach to predict continuous knee joint movements, in which muscle synergy reflects the motor control information to coordinate muscle activations for performing movements. Four human subjects participated in the experiment while walking at five types of speed: 2.0km/h, 2.5km/h, 3.0km/h, 3.5km/h, and 4.0km/h. The study finds that the acquired muscle synergies associate the muscle activations with human joint movements in a lower-dimensional space and have been further utilized for predicting knee joint angles. The proposed approach outperformed commonly-used numeric features from individual sEMG channels with an average correlation coefficient of 0.92±0.05. Results suggest that the correlation between muscle activations and knee joint movements is captured by the muscle synergy-driven ANFIS model and can be utilized for the estimation of continuous joint angles.
Wenjuan Zhong and Xueming Fu, master students of Southern University of Science and Technology, are the co-first authors of this article. Mingming Zhang, assistant professor of Southern University of Science and Technology, is the corresponding author of this article. Southern University of Science and Technology is the first unit and communication unit.