
Our masters student ,Haowen Liu and Fengxian Wu, proposed a study about Close-Range Human Following Control on a Cane-Type Robot With Multi-Camera Fusion in IEEE Robotics and Automation Letters (RA-L).
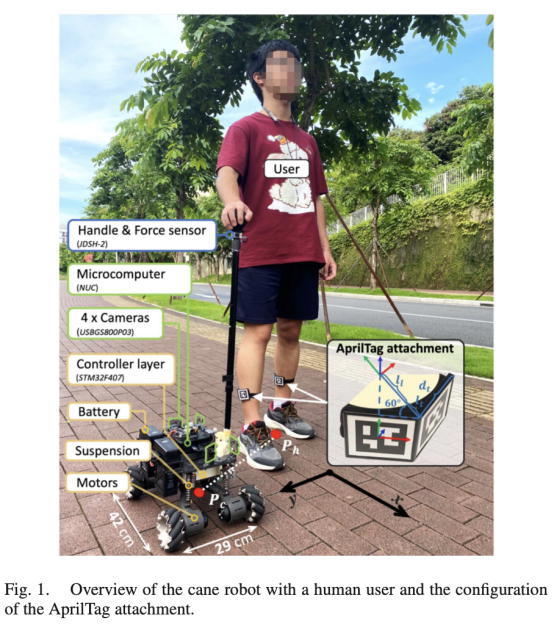
Cane-type robots have been utilized to assist the mobility-impaired population. The essential technique for cane- type robots is to follow the user’s ambulation at a close range. This study developed a new cane-type wheeled robot and pro- posed a novel human-following control frame with multi-camera fusion. This human following control adopts a cascade control strategy consisting of two parts: 1) a human following position controller that locates a user by detecting his/her legs’ positions via multi-camera fusion and 2) a cane robot velocity controller to steer the cane robot to the target position. The proposed strategy’s effectiveness has been validated in outdoor experiments with six healthy subjects. The experimental scenarios included different terrains (i.e., straight, turning, and inclined paths), road conditions (i.e., asphalt and brick roads) and walking speeds. The obtained results showed that the average tracking error in the X and Y directions was less than 4.1 and 4.4 cm, respectively, and the error in angle was less than 12.9◦ across all scenarios. Moreover, the cane robot can effectively adapt to a wide range of individual gait pat- terns and achieve stable human following at daily walking speeds (0.74 m/s–1.47 m/s).

Haowen Liu and Fengxian Wu, master students of Southern University of Science and Technology, are the co-first authors of this article.Mingming Zhang, assistant professor at Southern University of Science and Technology, is the corresponding author of this article.