
Our doctoral student Changqi Zhang proposed a study about An Optimized Portable Cable-Driven Haptic Robot Enables Free Motion and Hard Contact in IEEE International Conference on Robotics and Automation (IF = 5.9).
Task-oriented training with haptic rendering can boost robot-aided motor learning to tasks with similar dynamics. Although multi-DOF robots better match the rendering of real task scenarios, single-DOF haptic robots show great potential for home use with enhanced task rendering performance. This study presents our attempts to optimize and develop a single-DOF cable-driven robot with appropriate workspace and force rendering capacity. The core technologies consist of two aspects: 1) a multi-objective optimization method was adopted to obtain optimal configuration of the haptic robot; and 2) a slider-crank-mechanism-based portable cable-driven robot was developed. Performance evaluation experiments demonstrated that 1) the robot has a workspace larger than 300 mm; 2) the robot can achieve 40 N force output and 40 N/mm stiffness for hard contact; 3) the root mean square of the resistance during free motion is 0.93 N; 4) in the purely passive case (without motor compensation), the average resistance to back drive the motor is 2.5 N. These lead us to believe that the developed robot holds the promise to serve as a robotic rehabilitation training platform for home use on the neurological-impaired patients.
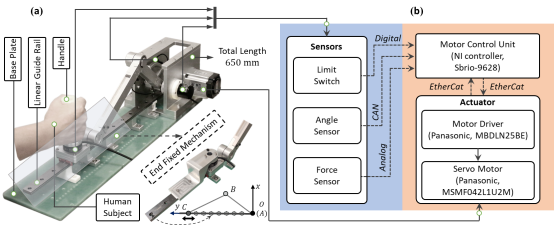
(a) Prototype of the single-DOF haptic robot. (b) Electronic implementation of the system.
Dr. Zhang Changqi from Southern University of Science and Technology is the first author. Mingming Zhang, assistant professor at Southern University of Science and Technology, is the corresponding author of this article.