
Our PhD student Zhang Changqi proposed a study about Two-Stage Optimization of a Reconfigurable Asymmetric 6-DOF Haptic Robot for Task-Specific Workspace in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Parallel mechanisms (PMs) are commonly used for developing haptic devices due to low inertia, high rigidity and precision. However, limited workspace impedes their application for task-oriented robotic therapy which generally requires large motion ranges. To solve this problem, first, a PM-based reconfigurable asymmetric 6-DOF haptic interface was presented, and then a two-stage optimization method was proposed to make the robot implement two kinds of task-specific workspaces including gross motor tasks (GMTs) and fine motor tasks (FMTs). Optimization of this robot was conducted to pursue a compact size and high accuracy. The global conditioning index (GCI) and the occupied area of the robot were selected as the evaluation indices, where the GCI was derived using a dimensionally homogeneous Jacobian matrix. A multi-objective optimization method based on the genetic algorithm (GA) was utilized. The actual design parameters were finally defined from solutions of the Pareto front. The proposed two-stage optimization method provides a feasible solution for determining task-specific robotic workspace of the reconfigurable mechanism
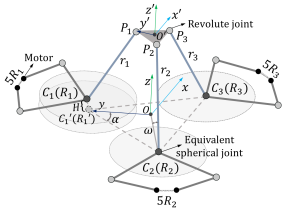
Kinematic model of the mechanism in the central configuration
Changqi Zhang is the first author of this article. Mingming Zhang, assistant professor at Southern University of Science and Technology, is the corresponding author of this article.