
Our undergraduate student Cunxi Dai proposed a study about Human-Exoskeleton Misalignment Reduction on Knee Joint via an RPR Mechanism-Based Device in IEEE International Conference on Advanced Robotics and Mechatronics (ARM).
Lower limb exoskeleton is playing an increasingly important role in robot-assisted rehabilitation. Knee joint dislocation of human exoskeleton is one of the common safety problems that hinder the natural movement of the wearer and even cause injury. Most exoskeletons use a single volute knee joint, which cannot fully achieve human knee movement. Therefore, the main challenge in reducing misalignment is to accurately measure and reconstruct the wearer’s knee movement in the sagittal plane. To achieve this, a wearable device with a volute prism-volute (RPR) mechanism, as shown in Figure 3, is designed to measure the wearer’s natural knee motion and determine the knee trajectory of the exoskeleton-7 to better match human-computer interaction. RPR devices can be flexibly adjusted to different wearer sizes. The measurement accuracy was verified by an optical motion capture system, and the non-interference of natural walking was verified. The effectiveness of reducing misalignment was evaluated using a simulation study based on kinematic calculations, which showed a 51% reduction in misalignment compared to a conventional single volute joint.
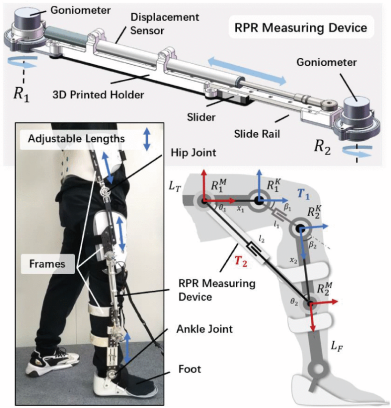
佩戴 RPR 测量设备的人类受试者、RPR测量装置模型及示意图
Cunxi Dai, a undergraduate student at Southern University of Science and Technology, is the first author of this article. Mingming Zhang, assistant professor at Southern University of Science and Technology, is the corresponding author of this article.