
Our master student Yudong Liu proposed a study about Haptic Rendering of Soft Object Interaction for Robot-aided Neurorehabilitation in International Conference on Advanced Robotics and Mechatronics (ICARM).
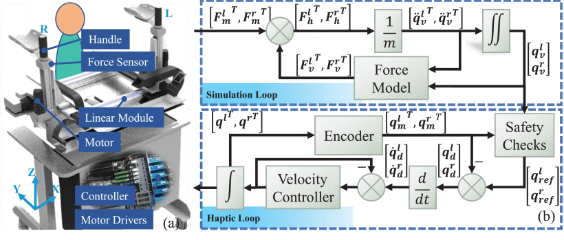
Neurologically impaired patients usually suffer from upper limb problems which affect their capabilities to perform activities of daily living (ADLs). To improve patients’ quality of life, several robots have been developed to deliver ADL trainings with haptic feedback which composes of interactive force that simulates tasks in physical world and haptic assistance/resistance derived from task-oriented control strategies. Specifically, the reality of delivered interactive force greatly relies on proper force modeling and robotic prototype. However, the majority of existing force models designed for rehabilitation are generally simplified to represent rigid bodies, which could not satisfy the increasing demands for modeling soft objects in complicated environment. Suitable robotic design should be determined to deliver these trainings. Herein, a training system that allows delivery of ADL tasks involving soft object manipulation is developed in this study. The system composes of a force simulator and a rehabilitation robot. Experiments were performed on a healthy individual with a cutting bread task. Effectiveness of this system was validated from following aspects: the robotic position/force tracing performance and realization of training task. Specifically, the position tracing error of robot was less than 2 mm and relative force tracing error was 5.5%. The individual was capable to perform cutting task, the average motion error was 0.13 mm. These results indicate that the proposed system has potential in delivering ADL trainings that involve soft object interaction. Future work will optimize the force tracing performance and examine this application in terms of clinical tests.
Yudong Liu is the first author of this article. Mingming Zhang, assistant professor at Southern University of Science and Technology, is the corresponding author of this article.