
Our undergraduate student Chenyu Gu and master student Weicong Lin,proposed a study about IMU-based Mocap System for Rehabilitation Applications: A Systematic Review in Biomimetic Intelligence and Robotics.
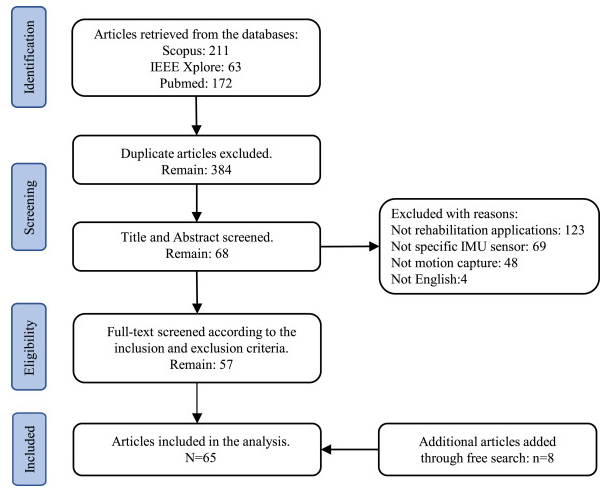
In recent years, the use of inertial measurement unit (IMU)-based motion capture (Mocap) systems in rehabilitation has grown significantly. This paper aimed to provide an overview of current IMU-based Mocap system designs in the field of rehabilitation, explore the specific applications and implementation of these systems, and discuss potential future developments considering sensor limitations. For this review, a systematic literature search was conducted using Scopus, IEEE Xplore, PubMed, and Web of Science from 2013 to 2022. A total of 65 studies were included and analyzed based on their rehabilitation application, target population, and system deployment and measurement. The proportion of rehabilitation assessment, training, and both were 82%, 12%, and 6% respectively. The results showed that primary focus of the studies was stroke that was one of the most commonly studied pathological disease. Additionally, general rehabilitation without targeting a specific pathology was also examined widely, with a particular emphasis on gait analysis. The most common sensor configuration for gait analysis was two IMUs measuring spatiotemporal parameters of the lower limb. However, the lack of training applications and upper limb studies could be attributed to the limited battery life and sensor drift. To address this issue, the use of low-power chips and low-consumption transmission pathways was a potential way to extend usage time for long-term training. Furthermore, we suggest the development of a highly integrated multi-modal system with sensor fusion.
Chenyu Gu and Weicong Lin, undergraduate and master student of Southern University of Science and Technology, are the co-first authors of this article.Mingming Zhang, assistant professor at Southern University of Science and Technology, is the corresponding author of this article.