
Our doctoral student Changqi Zhang proposed a study about Robot-Assisted Haptic Rendering for Nail Hammering: A Representative of IADL Tasks in IEEE Transactions on Automation Science and Engineering (IF = 6.636).
Restoring the capability to perform instrumental activities of daily living (IADLs) is an imperative step towards independent living for neurologically impaired individuals. Robot-assisted task-oriented training with haptic feedback has the potential to enhance patients’ ability to perform IADLs. However, robot-assisted haptic rendering of IADLs is extremely challenging due to their complex dynamic properties and has been rarely reported. Considering the broad impedance range characteristics from free motion to hard contact, nail hammering (NH) is chosen as a representative IADL task. This paper presents our attempts to render the NH task via a customized robot. The core technologies consist of two aspects: 1) a robot-assisted haptic modeling technique with guaranteed accuracy and computation cost (by combining practical measurement data and experience-dependent analytical functions); 2) a robot-assisted haptic rendering technique involving a haptic robot with broad impedance range and sufficient force feedback (via a low gear ratio cable transmission and redundant actuation parallel mechanism) and closed-loop impedance control with guaranteed passivity and stability. Human experiments demonstrate an accurate NH task rendering that all Pearson correlation coefficients between real and virtual tasks are larger than 0.89. The modeling sensitivity analysis showed that stiffness parameter has the greatest effect on the realism of haptic rendering, with an effect size of 0.94. This study represents an important step towards comprehensive robot-assisted task-oriented therapy with haptic feedback.
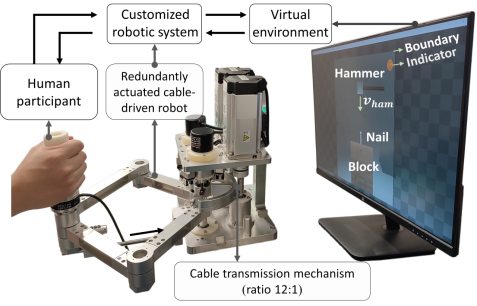
Schematic of the robot-assisted haptic rendering
The current study focused on the key to robot-assisted haptic rendering of IADL tasksrelies on simulating the contact force between tools and theenvironment, of which free motion and hard contact are thetwo most challenging force types.
Changqi Zhang is the first author of this article. Mingming Zhang, assistant professor at Southern University of Science and Technology, is the corresponding author of this article. Southern University of Science and Technology is the first unit and communication unit.