
Our master student ,RuiMa, and postdoctoral fellow,Yifeng Chen, proposed a study about A New Compound-limbs Paradigm: Integrating upper-limb swing improves lower-limb stepping intention decoding from EEG inIEEE Transactions on Neural Systems and Rehabilitation Engineering(jcr-2,IF: 4.9)
Brain-computer interface (BCI) systems based on spontaneous electroencephalography (EEG) hold the promise to implement human voluntary control of lower-extremity powered exoskeletons. However, current EEG-BCI paradigms do not consider the cooperation of upper and lower limbs during walking, which is inconsistent with natural human stepping patterns. To deal with this problem, this study proposed a stepping-matched human EEG-BCI paradigm that involved actions of both unilateral lower and contralateral upper limbs (also referred to as compound-limbs movement). Experiments were conducted in motor execution (ME) and motor imagery (MI) conditions to validate the feasibility. Common spatial pattern (CSP) proposed subject-specific CSP (SSCSP), and filter-bank CSP (FBCSP) methods were applied for feature extraction, respectively. The best average classification results based on SSCSP indicated that the accuracies of compound-limbs paradigms in ME and MI conditions achieved 89.02% ± 12.84% and 73.70% ± 12.47%, respectively. Although they were 2.03% and 5.68% lower than those of the single-upper-limb mode that does not match human stepping patterns, they were 24.30% and 11.02% higher than those of the single-lower-limb mode. These findings indicated that the proposed compound-limbs EEG-BCI paradigm is feasible for decoding human stepping intention and thus provides a potential way for natural human control of walking assistance devices.
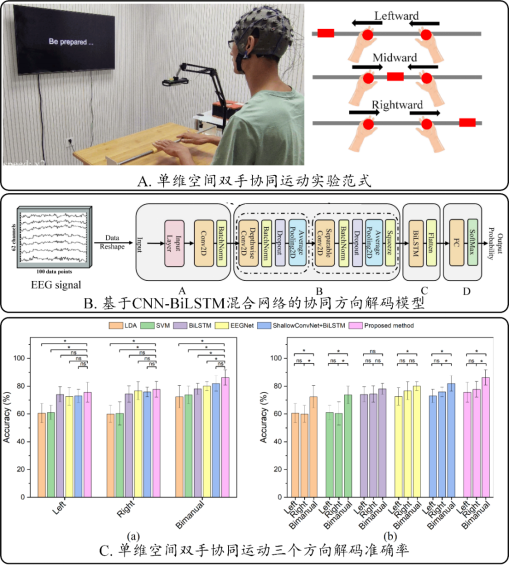
Experimental paradigm and main results of decoding the direction of coordinated movement of both upper limbs
Rui Ma, a master’s student at Southern University of Science and Technology, and Yifeng Chen, a postdoctoral fellow, are co-first authors. Mingming Zhang, assistant professor at Southern University of Science and Technology, is the corresponding author of this article.