

Prof. Shijie Guo will Give an Online Lecture about Flexible Lower Limb Recovery Exoskeleton For The Elderly
河北工业大学教授,复旦大学特聘讲座教授,博士生导师郭士杰,受张明明老师邀请,将于2021年1月31日下午15点-16点在腾讯会议(会议号:447 696 718)开展线上报告,题目为:面向老年人的柔性下肢助力康复外骨骼。 个人简介:

Prof. Xingang Zhao will Give an Online Lecture about Key Technology Of Intelligent Medical Rehabilitation Robot
博士,中国科学院沈阳自动化研究所研究员机器人学研究室副主任,辽宁省“兴辽英才”计划创新创业团队负责人,辽宁省医学手术及康复机器人技术工程研究中心副主任、中国医科大学-中国科学院沈阳自动化研究所医学机器人研发中心副主任赵新刚,受张明明老师邀请,将于2021年1月27日上午10点-11点在腾讯会议(会议号:743 646 964)开展线上报告,题目为:智能医疗康复机器人关键技术。 个人简介:
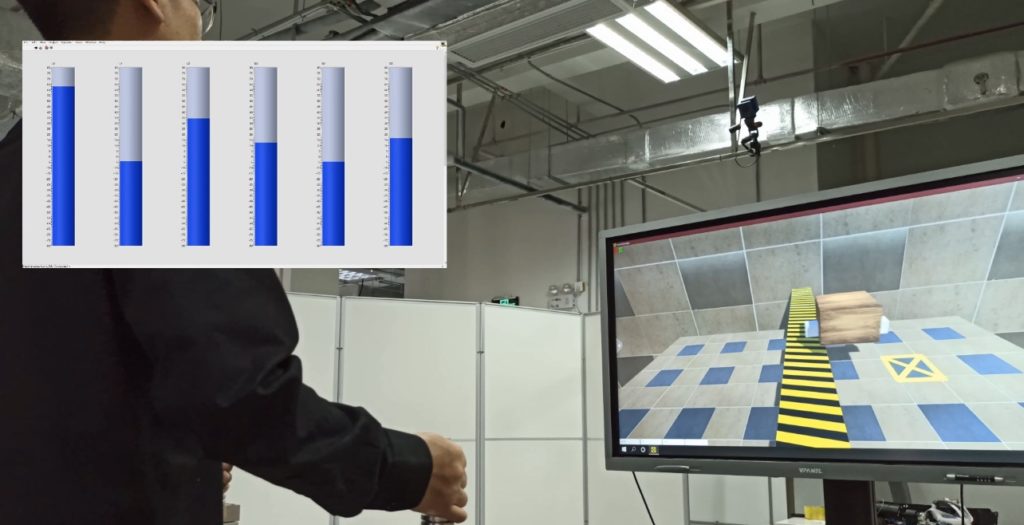
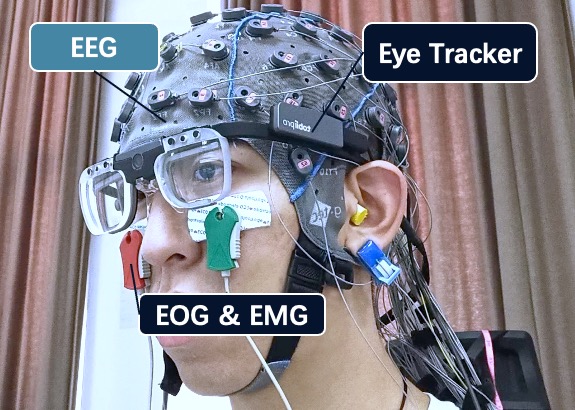
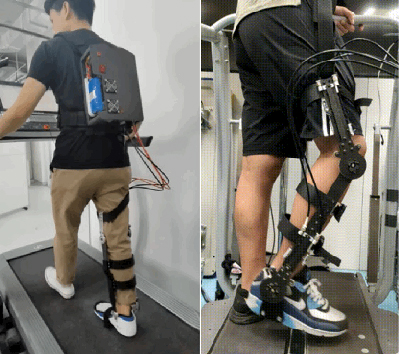
Prof. Guanglin Li was Invited to Give an Online Lecture about Human-computer Interaction
On 27 June 2020, Prof. Guanglin Li, the researcher of the Key Laboratory of the human-computer intelligent collaborative system of the Chinese Academy of Sciences, was invited by Prof. Mingming Zhang to give an online lecture on the Tencent Meeting.
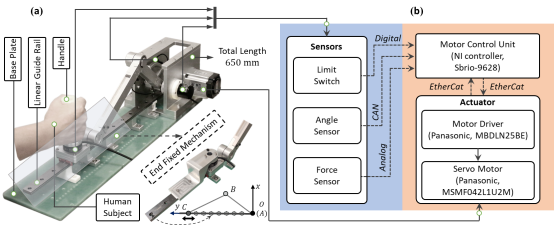
Research Progress in An Optimized Portable Cable-Driven Haptic Robot Enables Free Motion and Hard Contact was Reported by IEEE ICRA
Our doctoral student Changqi Zhang proposed a study about An Optimized Portable Cable-Driven Haptic Robot Enables Free Motion and Hard Contact in IEEE International Conference on Robotics and Automation (IF = 5.9).
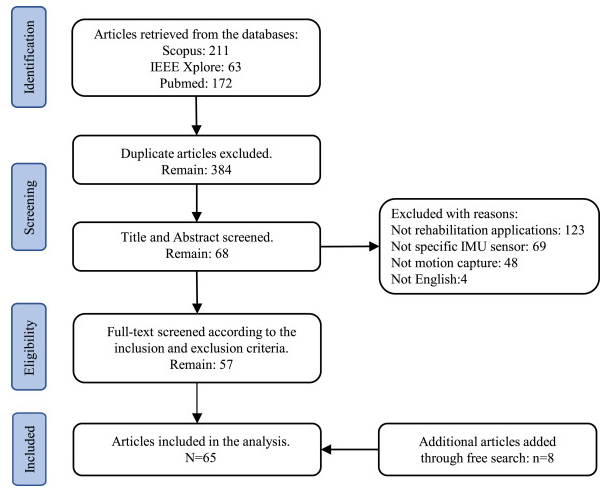
Research Progress in IMU-based Mocap System for Rehabilitation Applications: A Systematic Review was Reported by Biomimetic Intelligence and Robotics
Our undergraduate student Chenyu Gu and master student Weicong Lin,proposed a study about IMU-based Mocap System for Rehabilitation Applications: A Systematic Review in Biomimetic Intelligence and Robotics.