

Prof. Bin Fang will Give an Online Lecture about Tactile Perception And Interactive Learning For Robotic Dexterity
清华大学计算机系助理教授,中国人工智能学会认知系统与信息处理专委会秘书长方斌,将于2022年9月16日下午14点30分-115点30分在腾讯会议(会议号:930 723 619),为我们带来线上报告,题目为:机器人灵巧操作的触觉感知与交互学习。 个人简介:

张明明:2022年南方科技大学机器人交互技术及医工应用高端系列论坛
2022年南方科技大学机器人交互技术及医工应用高端系列论坛在主办单位南方科技大学的大力支持下将于2022年1月11-13日以腾讯会议的方式开展。本次专题在线论坛的组织架构为4位荣誉主席、13位指导委员会成员、2位组委会秘书、1位执行主席。 其中,张明明助理教授作为执行主席主持本次论坛。

张明明:任务导向性康复机器人及其多模态交互技术
张明明助理教授受邀在《机器人》“医疗机器人技术”专题在线论坛,于9月10日(周五)14:00-15:00作报告,题目为《任务导向性康复机器人及其多模态交互技术》
Prof. Zhang Mingming gave a Keynote Talk in 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR)
The 2021 IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR 2021) took place from July 15 to 19, 2021 in Xining, Qinghai, China. Dr. Mingming Zhang, from Southern University of Science and Technology, gave a Keynote Talk with the topic as Task-oriented rehabilitation techniques with robot-assisted information feedback.

Prof. Dongrui Wu will Give an Online Lecture about Machine Learning in Brain-Computer Interfaces
华中科技大学人工智能与自动化学院教授、博导,图像信息处理与智能控制教育部重点实验室副主任伍冬睿,将于2021年5月27日下午3点-4点在腾讯会议(会议号:960209065),为我们带来线上报告,题目为:Machine Learning in Brain-Computer
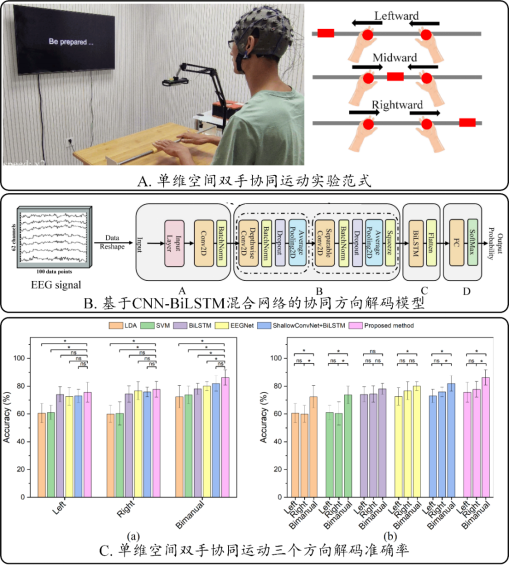
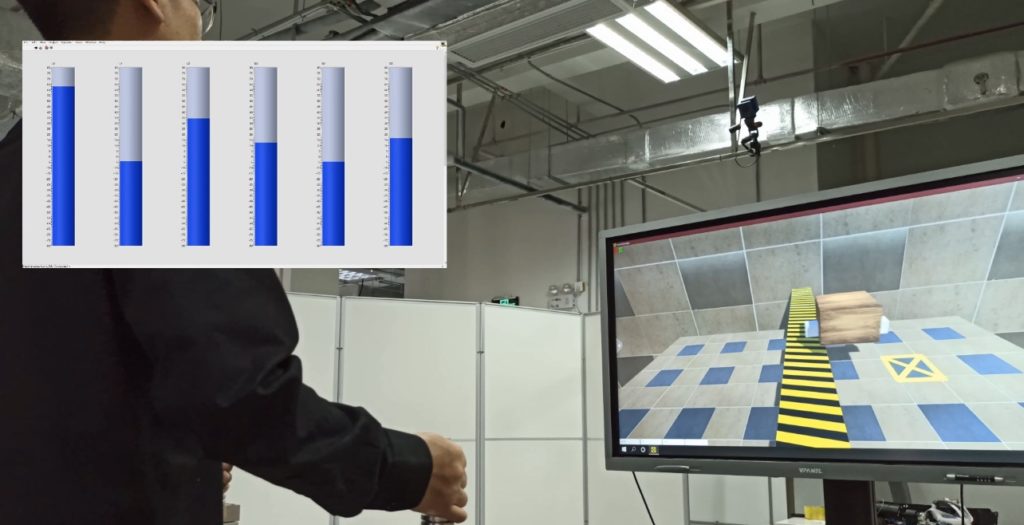
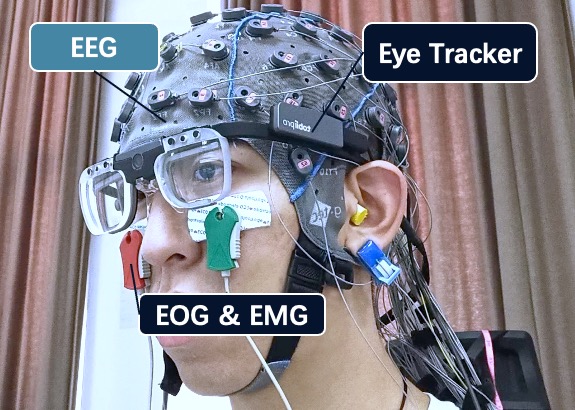
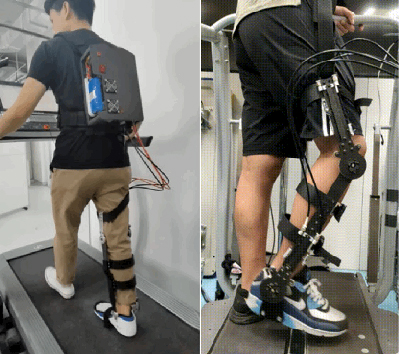
Research Progress in A New Compound-limbs Paradigm: Integrating upper-limb swing improves lower-limb stepping intention decoding from EEG was Reported by IEEE TNSRE
Our master student ,RuiMa, and postdoctoral fellow,Yifeng Chen, proposed a study about A New Compound-limbs Paradigm: Integrating upper-limb swing improves lower-limb stepping intention decoding from EEG inIEEE Transactions on Neural Systems and Rehabilitation Engineering(jcr-2,IF: 4.9)
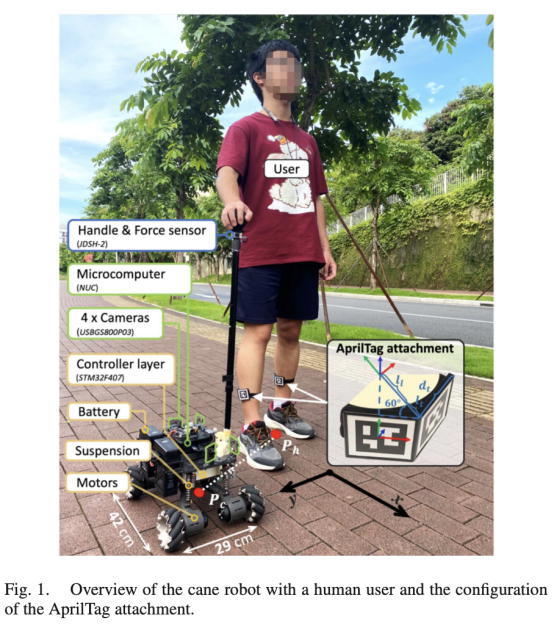
Research Progress in Close-Range Human Following Control on a Cane-Type Robot With Multi-Camera Fusion was Reported by IEEE RAL
Our masters student ,Haowen Liu and Fengxian Wu, proposed a study about Close-Range Human Following Control on a Cane-Type Robot With Multi-Camera Fusion in IEEE Robotics and Automation Letters (RA-L) (IF = 4.321).