
Our postdoctoral researcher, Dr. Miao Qing proposed a performance-based iterative learning control strategy for task-oriented rehabilitation in IEEE Transactions on Cognitive and Developmental Systems (IF = 2.667).
This method could be used for robot-assisted upper limb training, which can adaptively and rapidly convergent to subject-specific training difficulty levels for maximizing active participation of the patients.
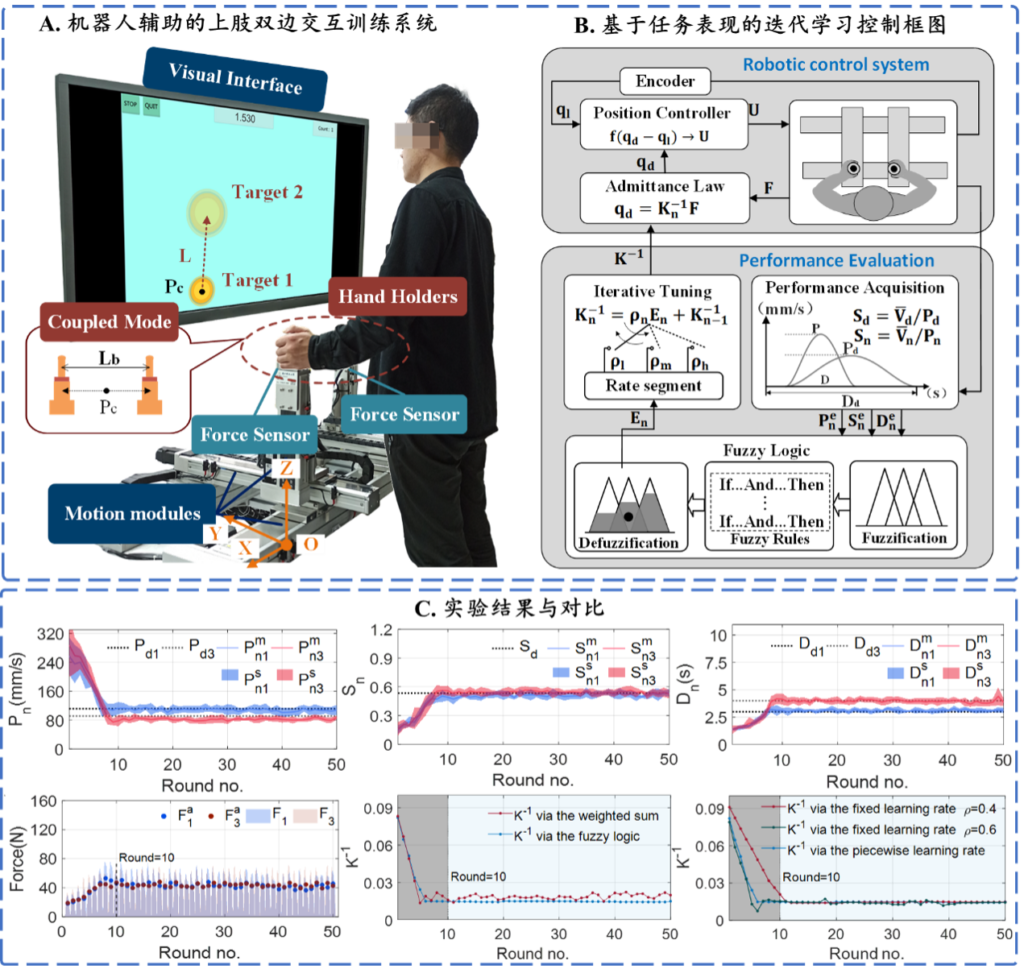
Active participation from human subjects can enhance the effectiveness of robot-assisted rehabilitation. Developing interactive control strategies for customized assistance is therefore essential for encouraging human-robot engagement. However, existing human-robot interactive control strategies lack precise evaluation indicators with effective convergence method to steadily and rapidly customize appropriate assistance during task-oriented training. To solve this problem, a performance-based iterative learning control algorithm is proposed.
In this method, three performance indicators based on a Fugl-Meyer Assessment (FMA) regression model are introduced to associate clinical scales with robot-based measures, and a fuzzy logic is employed for comprehensive performance evaluation. To increase efficient training time, a piecewise learning rate based iterative law is applied to quickly converge to a subject-specific control parameter session by session. The proposed strategy is preliminarily estimated for a case of bilateral upper limb training with an end-effector based robotic system. Experimental results with human subjects indicate that the proposed strategy can obtain appropriate parameters after only several iterations and adapt to random perturbations (like muscle fatigue).
Qing Miao, a postdoctoral fellow of Southern University of Science and Technology, is the first author of this article. Mingming Zhang, assistant professor of Southern University of Science and Technology, is the co-corresponding author of this article. Southern University of Science and Technology is the first unit and communication unit.