Research Progress in Two-Stage Optimization of a Reconfigurable Asymmetric 6-DOF Haptic Robot for Task-Specific Workspace was Reported by IEEE IROS
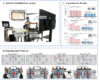
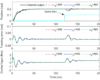
Our PhD student Zhang Changqi proposed a study about Two-Stage Optimization of a Reconfigurable Asymmetric 6-DOF Haptic Robot for Task-Specific Workspace in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
0 Comments
2021-12-16