
Research Progress in Two-Stage Optimization of a Reconfigurable Asymmetric 6-DOF Haptic Robot for Task-Specific Workspace was Reported by IEEE IROS
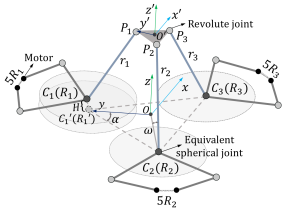
Our PhD student Zhang Changqi proposed a study about Two-Stage Optimization of a Reconfigurable Asymmetric 6-DOF Haptic Robot for Task-Specific Workspace in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
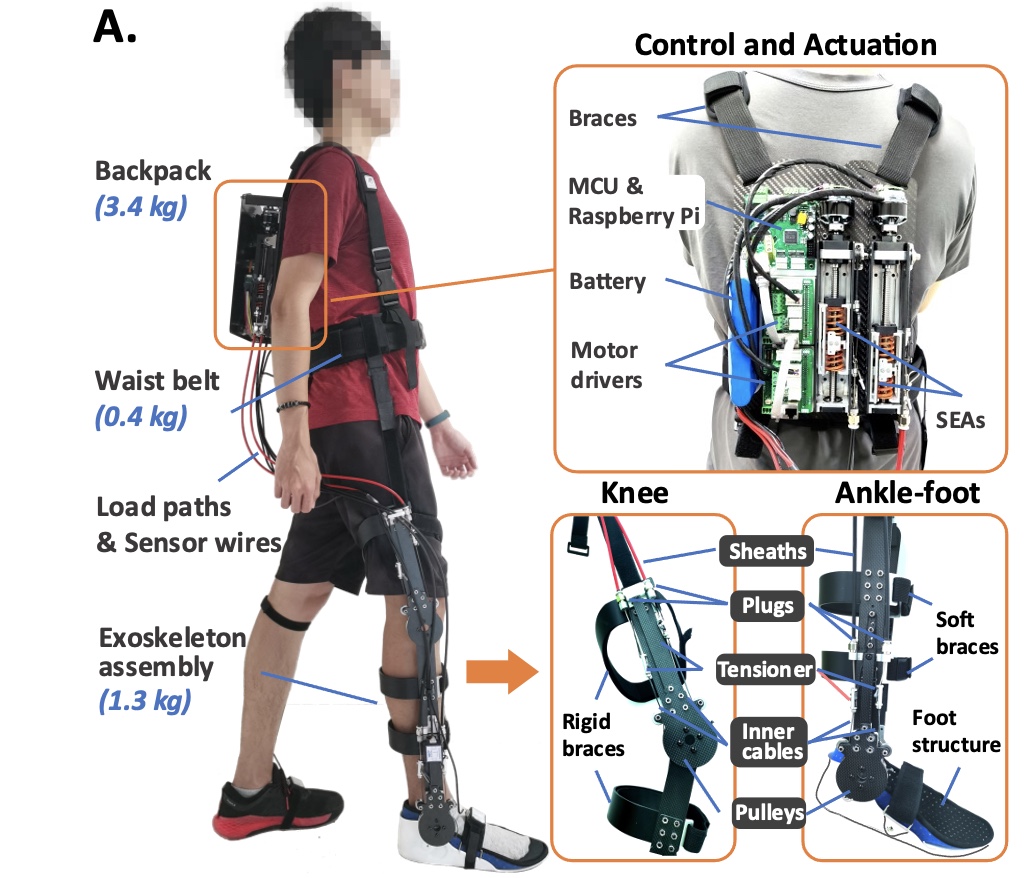
Research Progress in Toward Gait Symmetry Enhancement via a Cable-Driven Exoskeleton Powered by Series Elastic Actuators was Reported by IEEE RAL
Our Ph.D. student Bin Zhong proposed a study about Enhancement via a Cable-Driven Exoskeleton Powered in IEEE Robotics and Automation Letters (IF = 3.741).
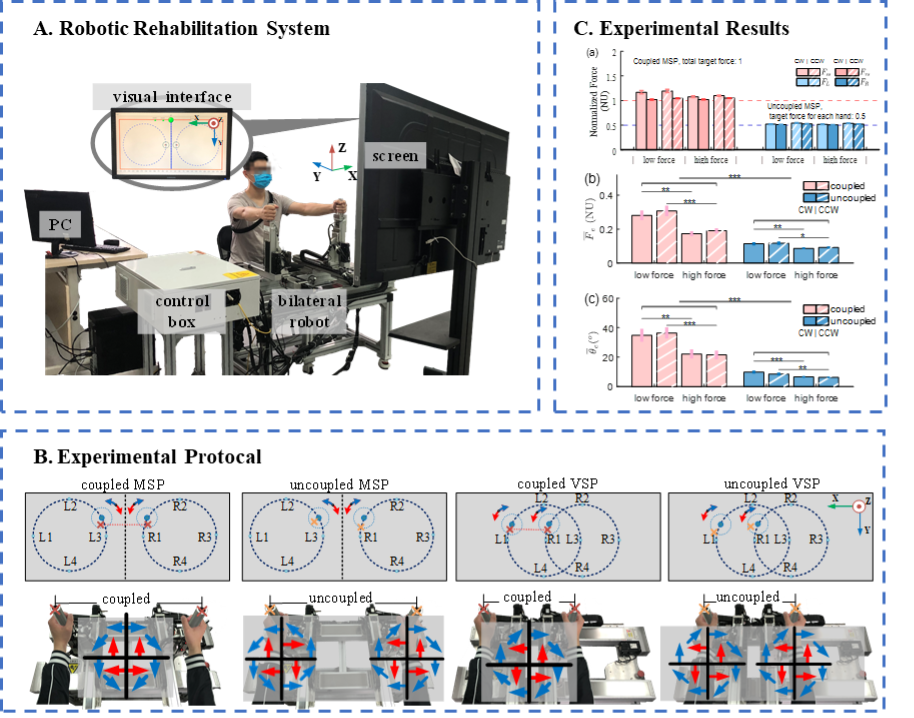
Research Progress in the Bilateral Asymmetry of Hand Force Production in Dynamic Physically-Coupled Tasks was Reported by IEEE JBHI
Our Ph.D. student Chenyang Sun proposed a study about bilateral asymmetry of hand force production in dynamic physically-coupled tasks in IEEE Journal of Biomedical and Health Informatics (IF = 5.772).
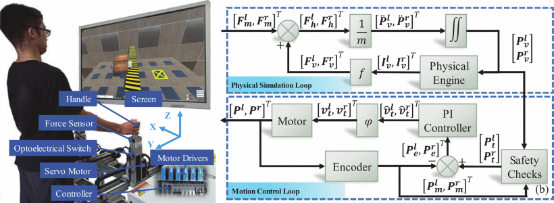
Research Progress in Robot-Assisted Haptic Rendering of Bilateral Physical Tasks via Physical Engine was Reported by IEEE RCAR
Our master student Yudong Liu proposed a study about Robot-Assisted Haptic Rendering of Bilateral Physical Tasks via Physical Engine in IEEE International Conference on Real-time Computing and Robotics.
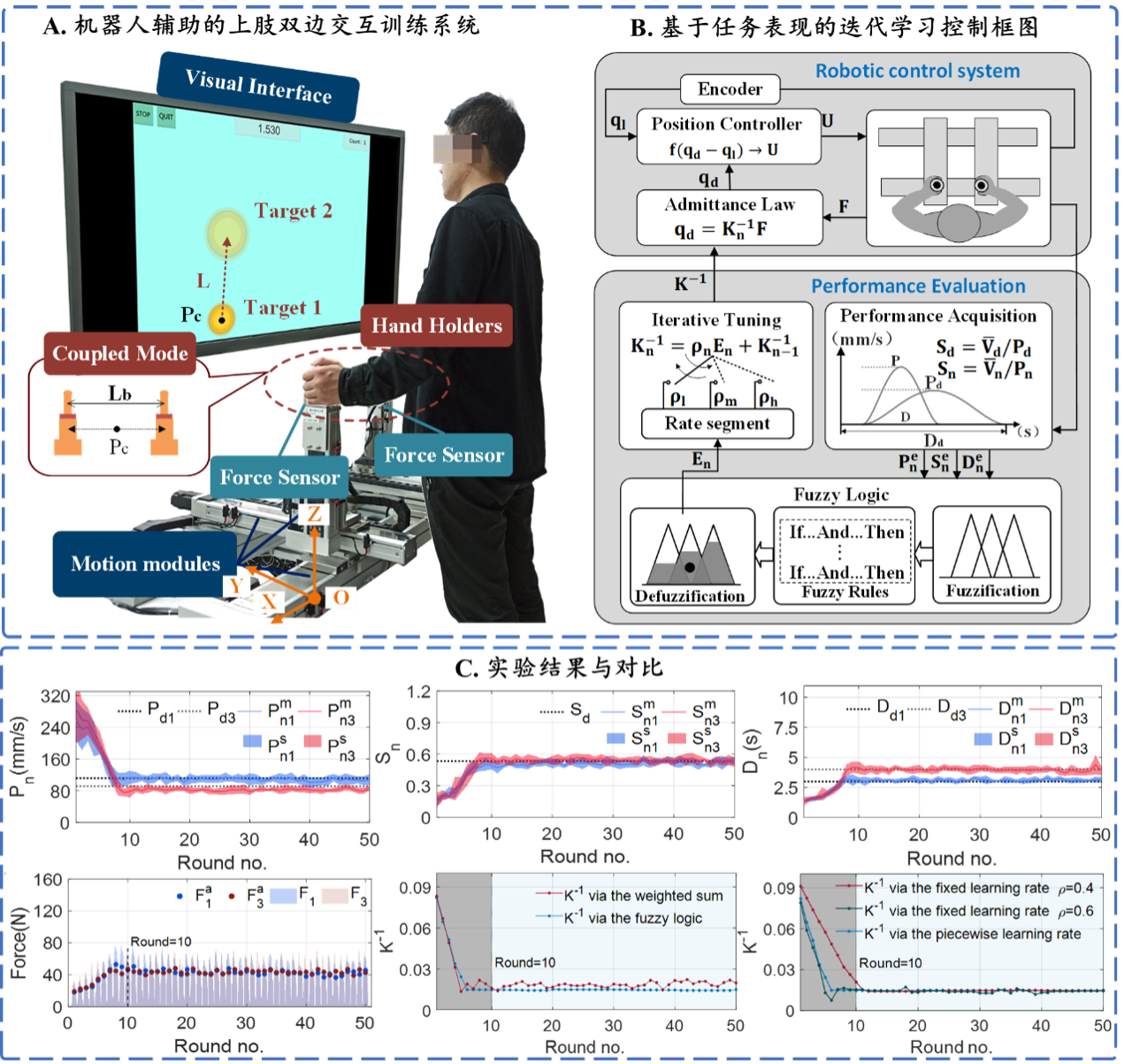
Research Progress in the Performance-based Iterative Learning Control Strategy for Task-oriented Rehabilitation was Reported by IEEE TCDS
Our postdoctoral researcher, Dr. Miao Qing proposed a performance-based iterative learning control strategy for task-oriented rehabilitation in IEEE Transactions on Cognitive and Developmental Systems (IF = 2.667). This method could be used for robot-assisted upper limb training, which can adaptively and rapidly convergent to subject-specific training difficulty levels for maximizing active participation of the patients.
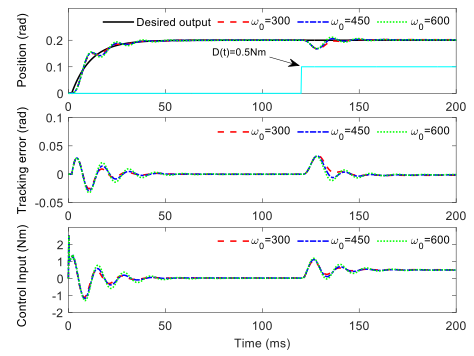
Research Progress in the Field of Servo Motor Drive Control Reported by IEEE TIE
Our postdoctoral researcher, Dr. Li Ping proposed an active disturbance rejection control (ADRC) method by combining 2-DOF internal model control (IMC) rules and linear extended state observer (LSO) in IEEE Transactions on Industrial Electronics (IF = 7.503). This method could be used for motion control of servo motor drive system with network communication delay, which significantly improves the control accuracy of servo system under parameter uncertainty and external disturbance.
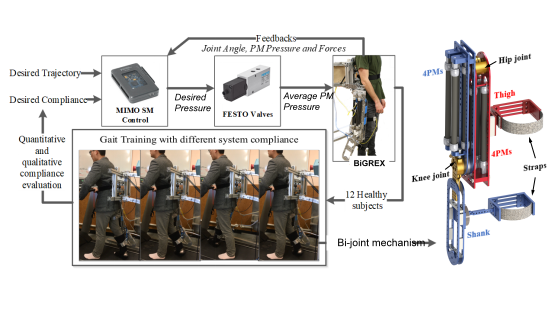
Research on the direction of flexible Rehabilitation Exoskeleton on-demand assistance strategy reported by IEEE TASE
2019级博士研究生钟斌在机器人工程领域旗舰期刊 – IEEE Transactions on Automation Science and Engineering(IF=5.293)上发表最新研究成果,该研究提出了一种基于滑模控制策略的下肢外骨骼关节位置及柔性同步控制算法,适用于人造气动肌肉驱动的康复设备,实现了按需辅助的柔顺控制提升了康复的效果。